En esta guía sobre robótica verás los motores de corriente continua también conocidos como motores DC cómo trabajan o se alimentan de corriente continua y cómo la que suministran las pilas o las baterías.
Si no sabes cómo controlar los motores en este post verás cómo en robótica se utilizan frecuentemente los motores de corriente continua por la facilidad de controlarlos y su fácil interconexión.
Empezamos con este kit para construir el robot:
1. Materiales
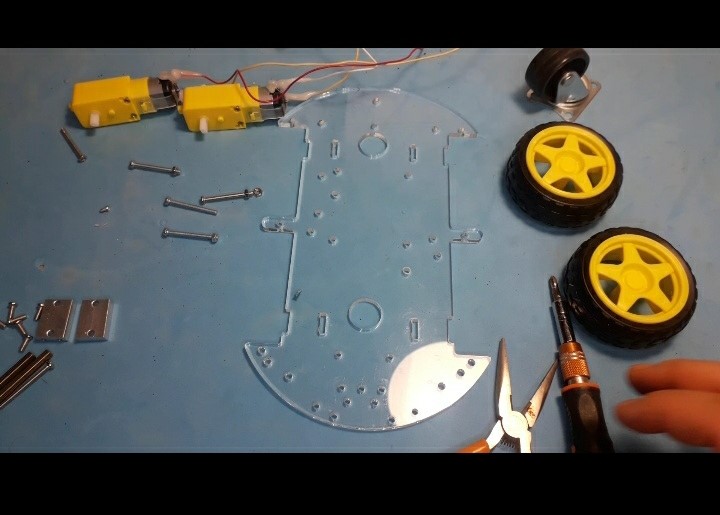
Empecemos describiendo los principales materiales:
Motores con llanta:
Básicamente 2 motores DC con caja reductora y su respectiva llanta, una velocidad promedio puede ser 100RPM, pero dependerá de la velocidad que uno desee.

El voltaje dependerá de la batería, por ejemplo con una batería de 6V o de 3.7V se puede trabajar con el motor amarillo. Si alimentamos un motor con un voltaje inferior al nominal, su velocidad disminuye, en cambio sí alimentamos con un voltaje superior podemos malograr el motor, por eso debemos de tener en cuenta las especificaciones técnicas del motor.
Batería
Esto tal vez sea lo más difícil de establecer, lo primero que hay que tener en cuenta es el voltaje. Hay que tener en cuenta el voltaje del motor. También hay que considerar la corriente y la capacidad, por ejemplo si usamos una pila económica de 9V nos durará menos de un minuto, se recomienda que la capacidad sea superior a 500mA/h.
A continuación mostramos las opciones que pueden usar dependiendo del motor que tengan:
Motor de 6V:
Opción 1: 4 pilas AA para los motores.
Opción 2: 1 celda de litio (batería de un móvil) para los motores.
Opción 3: Cualquier batería superior a 6V (de suficiente corriente) y un step down para bajar el voltaje.
Independiente del valor del voltaje de la batería podemos usar conversores DC-DC para aumentar (step up) o reducir (step down) el voltaje.
Chasis y rueda loca
Esto dependerá del diseño de cada uno, pueden hacerlo, o comprar uno hecho. El chasis básicamente es en donde se va a poner los dos motores con llanta y los demás componentes, adicionalmente se necesita una rueda giratoria o una ballcaster, que será el tercer punto de apoyo junto a las otras dos llantas.

2. Ensamblando la parte mecánica de nuestro Robot Móvil:
Para nuestro tutorial usaremos la configuración diferencial, que utiliza dos ruedas principales que dan la tracción y por diferencia de velocidad en estas podremos realizar giros. Usaremos esta configuración por ser fácil de implantar, a diferencia de la configuración Ackerman (la que usan los vehículo motorizados) que es más complicado de implementar la parte mecánica.
La principal diferencia entre estas dos configuraciones es en el giro del robot, en la configuración diferencial tenemos que invertir el giro en uno de los motores o simplemente disminuir la velocidad, en cambio en la configuración Ackerman necesitamos de un servomotor para girar las llantas delanteras.
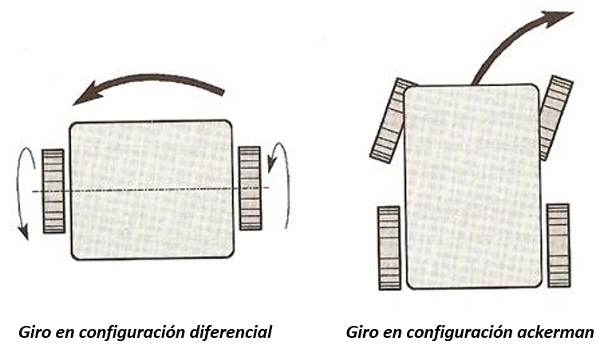
Como indicamos nosotros vamos a trabajar en la configuración diferencial y adicionalmente a las dos llantas principales necesitamos una o dos ruedas giratorias que nos servirán de apoyo, esta rueda lo podemos poner adelante y/o atrás.

Una vez tenemos los motores. Verificamos que funcionan adecuadamente. Para ello los energizamos con el portapilas.
De esta manera también verificamos el sentido de giro de los motores.
3. Electrónica
Empezamos con el primer circuito de prueba.
MATERIALES ELECTRÓNICOS
- Resistencia 1/4W 1K
- Transistor 2N2222
- Motor
- Cables
- Protoboard
Para mover los motores podemos hacerlo de 2 maneras:
- Conectarlos directamente a la fuente de alimentación.
- Conectar la salida de un transistor a uno de los motores.
¿Cómo conectamos un transistor a los motores?
Para empezar, usaremos el siguiente transistor tipo NPN: 2N2222.
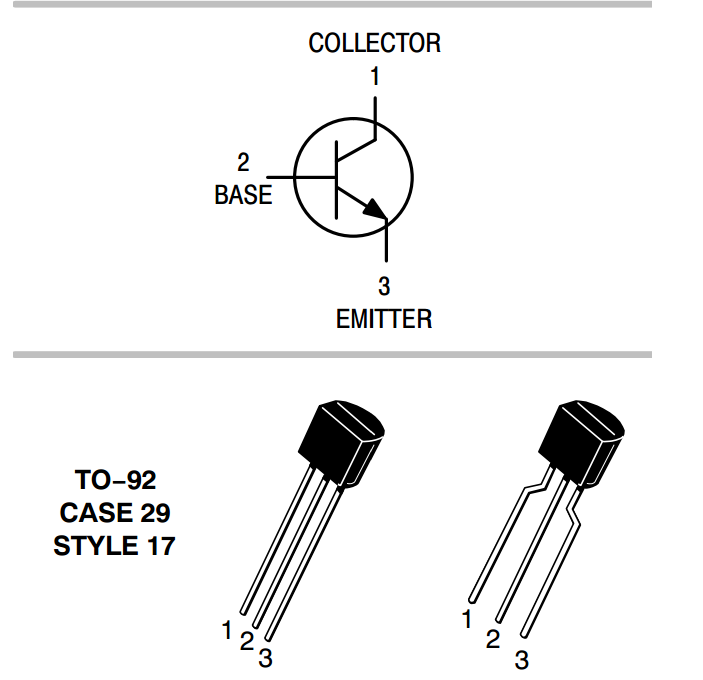
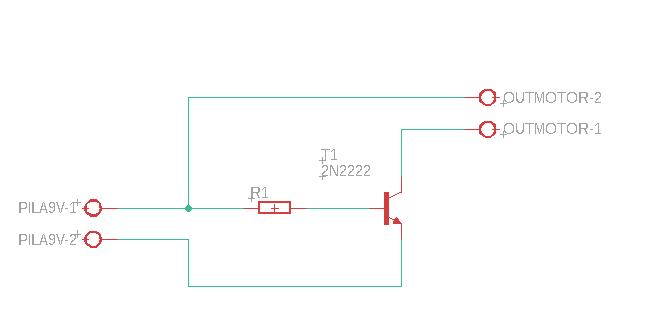
En este tutorial vamos a armar un circuito con el 2N2222, la batería va ir conectada una resistencia de 1 KOhm y posteriormente a la base del transistor.
El emisor va directo a tierra y el colector es la salida donde vamos a conectar el motor que vamos a manejar y el positivo al positivo de la batería.
Este circuito se basa en el modo de los transistores llamado POLARIZACIÓN de la base. (ver funcionamiento de un transistor).
Así tenemos el montaje en protoboard:

Circuito hecho en Eagle para más adelante diseñar la PCB del circuito.
Conclusión
Espero que esta guía te haya servido para conocer a fondo qué es un transistor para controlar un motor de CC.
Lo importante es hacer pruebas poco a poco de diferentes circuitos y transistores.
Si tienes alguna duda puedes dejarme un comentario y estaré encantado de responderte lo antes posible. Ah, y no te olvides de compartirlo en tu redes sociales si te ha servido de ayuda.